特集記事
シリーズ・さまざまな研究所を巡る(第7回)〜鉄道総合技術研究所(その2)〜
厚木エレクトロニクス 加藤 俊夫
〜鉄道総合技術研究所(その2)〜")
鉄道総研では、列車の安全運転をさらに高める技術や、乗り心地を良くする技術など非常に多くの研究が行われている。
とてもすべてを紹介できないので、そのうちのいくつかを取り上げてみる。
鉄道総研の非常に大きな業績は、リニアモーターカーの技術の開発であることはいうまでもない。
今回の最後にリニアモーターカーを取り上げることにする。
1. 乗り心地の改善
列車の速度が高速になるほど、左右、前後、上下への振動が多くなってしまう。
そこで、これらの振動を軽減して乗り心地を良くするため、車体の床下にはバネやダンパが使われており、その構造を図1に示す。
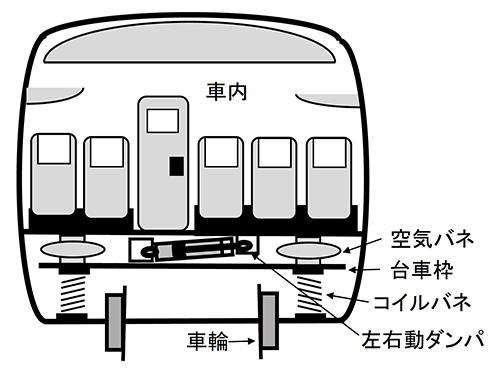
図1 車体の振動を防ぐバネとダンパ
これらの改善には種々の研究が行われているが、一例として上下制振制御システムを示す。
レールの継目通過にともなって発生する1~2Hzの上下方向の車体剛体振動が乗り心地に大きな影響を与えている場合がある。
このような振動に対して、台車枠と車体の間のばね系(2次ばね系)に制御技術を導入することにより上下の振動を抑制するシステムを開発した。
可変減衰機能を持つ上下方向の油圧ダンパを空気ばねと並列に取り付け、このダンパの減衰力を加速度センサで測定した車体の振動に合わせて制御し、振動を抑制する(図2)。
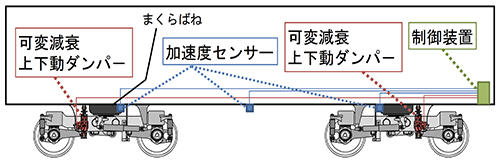
図2 上下制振制御システムの構造(資料は鉄道総研提供)
2. 安全運転に関連した研究
列車を安全に走らせることは、最重要な研究テーマである。
昔から各種の安全対策が行われているが、まだまだ研究テーマが多い。
そのいくつかを紹介する。
1.橋梁メンテナンスのIoT化
橋梁を列車が通過する時、振動発電を利用してセンシング結果の無線送信を行うモニタリングシステムが開発された。
無線で送信されたセンシング結果は、橋梁上を通過する列車で受信する。
疲労き裂などの異常が発生していれば、センシング結果の無線送信を図3のように受信して対策を取ることができる。
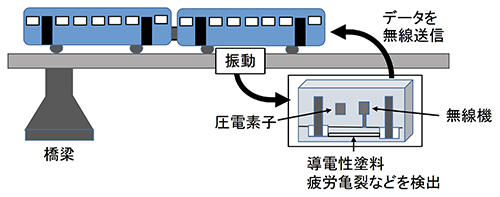
図3 振動発電を利用したセンシングデータを無線で橋梁を通る列車に送るシステム(鉄道総研提供の資料を元に筆者が作成)
試作したプロトタイプシステムを実際に橋梁に設置し、列車通過時の動作を検証した。
振動発電で得られた電力は、電気二重層キャパシタに充電することで、得られた電力のみで、2年以上にわたり測定が継続して行われることを確認した。
現在、一般社会でもトンネルや橋などの社会インフラのIoTによるメンテナンスが話題となっているが、エネルギーハーベスティングを用いた今回の研究は、その先駆けといえる。
2.早期地震警報の高度化
巨大地震が発生した場合、走行中の列車はすぐに止めなければならない。
気象庁から緊急地震速報が配信されているが、それとは別に鉄道総研でも速報を出すための技術開発が続けられている。
鉄道の地震計でP波を捉えて、それより遅れて来るより大きなS波を予測するわけである。
従来のシステムでは、通常、初期微動2秒間分のデータに基づき地震諸元を推定している。
より早く・正確に警報を出すために、P波初動1秒間の上下動加速度データに1次関数をフィッティングさせ、その傾きから震央距離を推定する手法(C-Δ法)を開発した。
また、新しい震央方位推定手法としてP波変位波形の最初の半波長分のデータ(可変長データ)に対して主成分分析を行なう手法(可変ウィンドウ法、図4)を開発した。
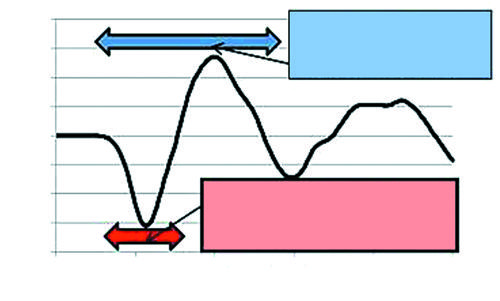
図4 新しい震央距離推定手法:可変ウィンドウ法(資料は鉄道総研提供)
これらの手法を組み合わせ、最短1秒のデータで警報を出力することが可能となった。
さらに、システムの信頼性向上を目指したノイズ識別手法も開発され、これらの新たなアルゴリズムを実装した地震計が現在、鉄道で活用され始めている。
3.地震対策ダンパ
地震対策ダンパは、常時は通常の左右動ダンパと同様、乗り心地の向上のために機能し、地震時には極端に大きなピストン速度に応じて、より大きな減衰力を発生し、地震動による大きな車体の振動を減衰して脱線に対する安全性が向上する。
この地震対策ダンパでは、特別な制御装置などは必要なく、現行の左右動ダンパとの容易な置き換えが可能である。
電磁弁付きと電磁弁が付いていないタイプの地震対策左右動ダンパの写真を、それぞれ図5に示す。

図5 2種類の地震対策ダンパ 地震対策ダンパの外観(フルアクティブ制御用電磁弁付き) 地震対策ダンパの外観(パッシブ型)
大型振動試験装置による実台車加振試験(図6)の結果、地震対策ダンパを装備した場合には、現行のダンパを装備した場合に比べ、大きな加振振幅まで輪重がゼロにならない(=車輪が飛び上がらない)ことが分かり、脱線に対する安全性が向上することが確認された。
また、新幹線車両に実装し最高速度320km/hまでの走行試験の結果、フルアクティブ振動制御に対し正常に動作すること、現行の左右動ダンパを装備した場合と変わらない乗り心地を実現できることが確認された。
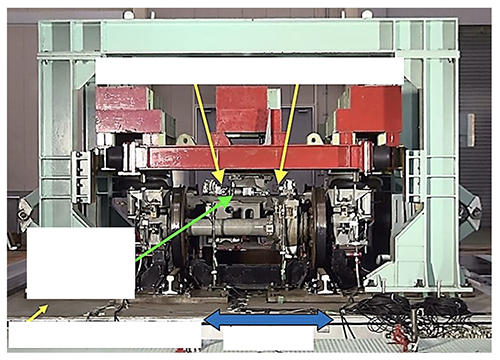
図6 大型振動試験装置による実台車加振試験の様子
4.地震の被害の軽減
地震が起こった場合の被害を軽減することも重要で、そのための研究が行われている。
一例として河川橋脚や店舗利用高架橋などで、一般的な耐震補強の実施が困難な場合、地震エネルギーを吸収する制震ダンパを適用する事例が増加している。
橋脚上部に対する部分的な工事のみで大幅な耐震性の向上が可能である。
図7のような制震ダンパによる補強を行う際に必要となる設計法と設計手引きを作成した。
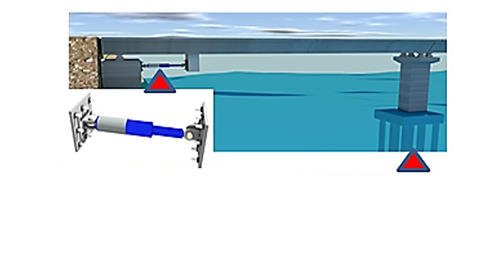
図7 制震ダンパによって大幅に耐震性が向上する(資料は鉄道総研提供)
3. リニアモーターカーの開発
鉄道総研の最大の業績は、リニアモーターカーの技術を完成したことであろう。
新幹線が東京・大阪間に開通した1960年代、次世代の鉄道について、時速500㎞/hで東京・大阪間を1時間で結ぶような新技術についていろいろ議論された。
当然、線路の上を車輪が回るのでは粘着力不足(車輪が空回りする)により、この速度は実現できないので、車体を浮かすことが考えられた。
すでにイギリスやフランスでは、ホーバークラフトのように空気で浮上するホーバーカーが試作されていたが、騒音が大きく実用化は無理であった。
ドイツでは、初期には超電導方式も検討されたが、通常の電磁石による方式のリニアモーター車の開発が進められた。
日本では地震が多いこともあって、10㎝の浮上が必要と考えられ、そのために必要な磁力を得るには強力な磁石が必要であった。
そこで、超電導による磁石の使用が決定された。
世界中の誰も開発していない未知の技術への挑戦であった。
1.超電導による磁石
超電導現象は、1911年オランダのオンネスにより発見された。
液体ヘリウムの温度(絶対温度4℃、すなわち-269℃)まで冷却すると、水銀の電気抵抗がゼロになることを発見した。
その後、超電導の現象はいくつかの物質で発見されたが、なぜそんな現象が起こるのか長い間、不明であった。
それを理論的に解明したのはバーディーン、クリーパー、シュリファーの3名でその頭文字からBCS理論といわれ1957年であった。
超電導物質をループ状にして電流を流すと、抵抗がゼロなので永久に電流が流れ、発生する磁場も永久に続くので通常の磁石と同じように使えるわけである。
リニアモーターカーで使用されている超電導電磁石のコイルは、ニオブ・チタン (NbTi) 合金系の極細線を数千本束ねて銅に埋め込まれた超電導線のループ(巻線)で、磁束密度は約5T(テスラ)の強力な電磁石を構成することができる。
超電導状態を維持するためには、液体ヘリウムの入った容器に入れ、輻射シールド板が設けられ、その外側は液体窒素で(-196℃)に冷却され、内部は真空で断熱されている。
2.リニアモーターカーの構造
リニアモーターカーが進行するには、3つの力が必要である。
すなわち、前方に推進する力、車体を浮上する力、側壁から左右にぶれないようにガイドする力。
これらを車両内に設置した超電導磁石で行っている。
(1)超電導磁石による推進力
まず、前方へ推進する力は、図8のように軌道側壁に設置されているコイルの磁場と、車内の超電導による磁場による力によって行っている。
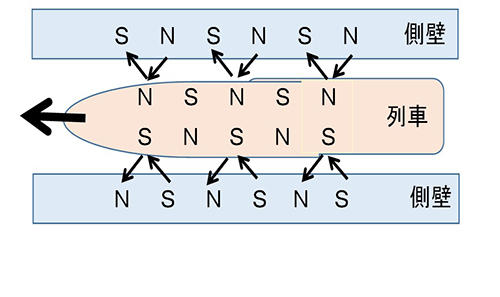
図8 リニアの推進の原理
前方のコイルには電流を流さなくてはならないが、これは車内からでなく本部からコントロールしている。
本部では、列車がどの位置にいるかを知って、その列車のある場所のコイルに電流を流す。
本部で正確な車両位置を知るため、車両の発信機から一定周波数の信号を送る。
軌道側壁のアンテナは車両側から発信した信号を受信し、この信号を合成して正弦波を構成する。
正弦波の数をカウントすれば、列車の絶対位置が検知できて、その精度は数cmと非常に正確である。
したがって、リニアモーターカーでは、運転手は居ても居なくても関係なく、運転は本部が行っている。
(2)超電導磁石により浮上
電磁誘導の原理を中学校で習ったおぼえがあると思う。
コイルに磁石を近づけたり遠ざけたりするとコイルに電流が発生するという原理である。
リニアモーターカーが進行すると、側壁に設置されているコイルに電流が流れ磁場が発生する。
浮上コイルは、上下二つのコイルが8の字型に接続され、垂直な側壁に配置されている。
車両の超電導磁石が浮上コイルに近づくと、8の字型コイルにそれぞれ逆向きの誘導電圧が発生して互いに打ち消しあい、結局、誘導電流は流れず浮上力も発生しない。
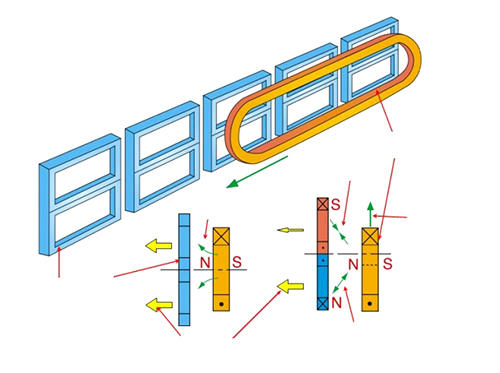
図9 リニアモーター車の浮上の原理(資料は鉄道総研提供)
いっぽう、超電導磁石が浮上コイルの中心より下方だと、上側のコイルよりも下側のコイルに発生する誘導電圧が大きくなり、超電導磁石と同極になって反発力が発生し、逆に上側のコイルは異極になって吸引力が発生し、結局、●図9のように車両に浮上力が働くことになる。
ただし、駅を出た直後など低速の時には、側壁のコイルの電流値が低く十分浮力が得られないので、ゴム製のタイヤを出して線路の上を走行することになる。
(3)超電導磁石により左右のブレをガイド
図10は、車両がどちらかの側壁に近づいていると、反発して正常な位置に戻す力が働き、左右のブレを修正するガイドの原理である。
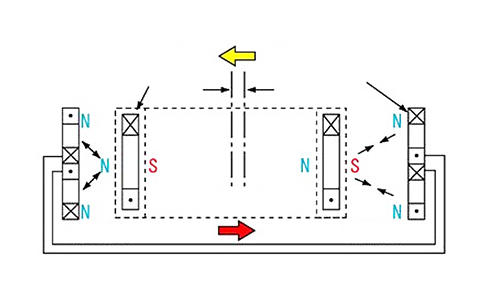
図10 リニアモーター車の左右ブレを防ぐガイドの原理(資料は鉄道総研提供)
車両が左右どちらかに片寄った場合には、近づいた側と遠ざかった側でガイドコイルに発生する誘導電圧に差が生じて電流が流れる。
その結果、近づいた側のコイルと超電導磁石との間に反発力、遠ざかった側のコイルとの間には吸引力が発生して、超電導磁石を中央に押し戻す。
こうして、常に車両は側壁の中央を走るようにガイドされる。
このガイドも浮上力と同様、車両の速度とともに大きくなり、高速になるほど車両の姿勢は安定する。
3.リニアモーターカーについて雑感
筆者は長年、ソニーで働き、世界初といわれる数々の商品に関係してきた。
その経験から良く分かるが、鉄道総研の研究者が世界初のリニアモーターカーを開発されるのにどれだけご苦労があったかは部外者には想像もできない。
図11は世界で初めての超電導磁石の電磁誘導浮上で走行したリニアモーター実験車である。
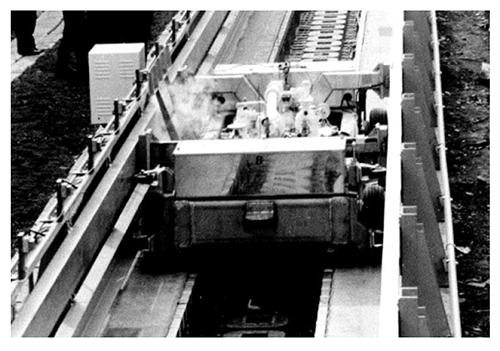
図11 世界初の電磁誘導浮上で走行したLSM200(資料は鉄道総研提供)
研究者にとって、この世界初の実験車の成功がどれほど嬉しかったことか。
リニアモーターカーは超高速以外に、どんな急坂でも登れるという大きな特徴がある。
そこで筆者の独断であるが、山谷の多い日本の国土のどこでもトンネルを掘らず陸橋などかけずに走れるわけで、新幹線網よりリニア鉄道網を作った方が安価ではないかと思われる。
また、メンテナンスが非常に簡単なのも大きなメリットである。
騒音も風切り音のみで、パンダグラフや線路からの騒音がなく、快適な乗り物と思われる。
空中に浮いた状態で超高速走行するので、一種の飛行機といってもよいわけであるから航空法の規制に従うのだろうか?(Joke!)
4. まとめ
鉄道総研は、時速200㎞/hの壁を破る新幹線の技術を実現し、さらに550㎞/hを実現したリニアモーターカーの技術を完成させ、世界の鉄道界の技術を牽引してこられた。
まさに世界に誇るべき成果である。
次は何だろうか? 現在の研究テーマを拝見すると、安全運転、災害対策、省エネ、メンテナンスの改善、乗り心地の改善など地道な研究が多いようで、我々一般の乗客にとっては重要な研究ばかりである。
鉄道は、これまでも、今後も、日本の産業の発展や国民の幸せのために重要な役割を果たして行くと思われるので、鉄道総研のますますのご健闘を期待したい。







